Ocean Newsletter
第341号(2014.10.20発行)
- 福井県小浜市長◆松崎晃治
- 備前市立日生中学校教諭◆藤田孝志
- 大阪大学大学院工学研究科 OUXTチームリーダー◆藤本直也
- ニューズレター編集代表((独)海洋研究開発機構上席研究員/東京大学名誉教授)◆山形俊男
国際海上ロボットコンテスト~「Maritime RobotX Challenge」に向けた挑戦~
[KEYWORDS]海上ロボットコンテスト/双胴船/OUXT-Polaris大阪大学大学院工学研究科 OUXTチームリーダー◆藤本直也
2014年10月、シンガポールにて双胴船を用いた国際海上ロボットコンテスト「Maritime RobotX Challenge」が開催される。世界5カ国から3チームずつが参加し、自動操縦にて直線走行、海中探査、着桟、画像認識、障害物避行の5つの課題に挑む。
日本代表チームの一つである関西の学生を中心とした「OUXT-Polaris」の活動と大会の概要を紹介したい。
「Maritime RobotX Challenge」の概要
アメリカではオバマ大統領の指揮の下、世界中の工学部の学生が国際的なコンテストを通して、技術的・専門的な分野への関心を持つことを目的に、飛行機、自動車などを対象としたさまざまなロボットコンテストが開催されている。その一環として、2014年10月20日からシンガポールのマリーナベイを舞台として、国際海上ロボットコンテスト「Maritime RobotX Challenge」がAUVSI Foundationによって開催される。
本大会には、日本、アメリカ、オーストラリア、シンガポール、韓国の5カ国から、それぞれ3つの大学を代表した計15チームが参加する。各チームには共通のプラットフォームである全長4mの双胴船が支給され、この船体に推進器、GPSやレーザーといった各種センサー類、バッテリー、自動操縦のためのパソコンとプログラムなどを搭載して会場に設けられた5つの課題に挑む。完全な自動操縦で全ての課題に挑まなければならないということ以外に、法律に違反しなければルールの制限はなく、どんな装置を載せることも、スポンサーを募ること、連合チームを作ることなども許可されている。優勝賞金の10万ドルをかけて、各課題の競争内容、活動紹介のプレゼンテーションと書類、そしてチームのホームページ等による情報発信能力の総合評価で競いあう。
「Maritime RobotX Challenge」は今回が初の開催であり、今後も2年おきに場所を変えつつ、第2回大会(2016年)はハワイ、第3回大会(2018年)は日本で開催される予定である。
5つの課題の概要

本大会で使用されるコースは、「直線走行、海中探査、着桟、画像認識、障害物避行」の5つの課題エリアが1つになったものであり、一度スタートしたら中断するかゴールするまで、全て自動操縦で挑まなければならない。ここではそれぞれの課題について簡単に紹介したい。
課題1は、赤と緑のブイで作られたスタートとゴール間を走り抜けるというものである。課題2は、指定された海域内に、超音波を発生させるピンガーという装置をつけた様々な色のブイが浮かんでおり、そのうち1つが起動している。ここでは、超音波を発生させているブイの緯度経度、色、ピンガーの深さを求め、報告しなければならない。課題3では、丸、三角、十字の看板をもつ3つのドックのうち、指定されたマークがあるドックへと着桟を行う。課題4では海上に浮かぶライトのついたブイを発見し、ライトの色の変化を判別し、報告しなければならない。最後の課題5では、スタートとゴールがそれぞれ3つあり、定められたスタートからゴールまで、障害物の青い球状のブイを避けつつ進まなければならない。
チーム「OUXT-Polaris」の活動について
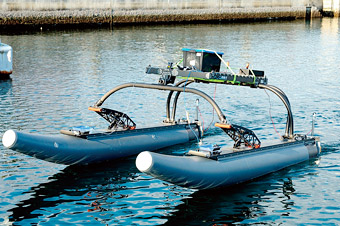
■OUXT-Polaris試走の様子
今回、日本からは大阪大学、東京大学、東京工業大学が出場している。私が所属する大阪大学チームは、大阪大学の学生を中心に、NHKロボコンでの実績を持つ京都工芸繊維大学のメンバーが集まり、また実海域での実験場を学内に有し、船体操縦の技術と経験を持つ神戸大学海事科学部の協力をうけて、関西合同チーム「Osaka Union RobotX Team-Polaris (通称OUXT-Polaris)」として、2013年の11月19日、正式に活動を開始した。
まず初めに行ったのは、推進器の試験だ。小型船舶にて使用されるエレキモーターを改造し、ラジコンやWi-Fiを通して遠隔で自由に操作できるようにした。電流の流れすぎによって制御盤が壊れるといった問題を乗り越えつつ、推進器に問題がないという段階に至ったのが4月であった。大会の詳細なルールが発表されはじめたのもちょうどこの頃であり、本格的にセンサー類のテストも始めた。
私たちの船体は、GPSとコンパスの自身の位置情報を取得しつつ、正面につけたwebカメラと三脚に載せた360度映るカメラによって看板のマークや障害物の色を認識し、水平方向に赤外線を飛ばし、物体の位置を検出するレーザレンジファインダーによって障害物との距離と方位を計測する。これまでの実験で着桟や指定地点への自動操縦に成功してきた。
9月16日、シンガポールへ向けて船体を発送した。今は大会までの間、プログラムの調整やプレゼンテーションの準備などを行っている。
「Maritime RobotX Challenge」にむけて
チーム「OUXT-Polaris」は活動をしていく中で、神戸大学や海事産業の方々はもちろん、電子機器会社や広告代理店などさまざまな業界からのスポンサー、アメリカの主催者の方々と繋がる機会を得た。さまざまな方々にご協力を頂き、これまで各々が持っていなかった多様な方面の知識・技術や人と真摯に向き合うことを学ばせていただいた。是非とも優勝を狙っていきたい。今回、実装が間に合わなかった機能もあり、第2回、第3回大会に参加する後任の学生たちに、加工や設計、プログラムなどのノウハウを継承していく必要もあり、このチームがどのように大きくなっていくのか、どんな船体ができ上がるのか今後の展開が非常に楽しみである。(了)
第341号(2014.10.20発行)のその他の記事
- 小浜市の沿岸域総合管理が目指すところ
- 人と海に学び、豊かな感性を育てる海洋学習~アマモ場の再生活動を通して~
- 国際海上ロボットコンテスト~「Maritime RobotX Challenge」に向けた挑戦~
- 編集後記