Ocean Newsletter
第91号(2004.05.20発行)
- 東京海洋大学 海洋工学部教授◆小林弘明
- (有)マリン・エコ・テック代表取締役◆白崎勇一
- 東海大学海洋学部海洋土木工学科 教授, Ph.D.◆福江正治
青木マリーン(株)専務取締役◆山崎正一 - ニューズレター編集委員会編集代表者((社)海洋産業研究会常務理事)◆中原裕幸
わが国のAUV開発とこれから
(有)マリン・エコ・テック代表取締役◆白崎勇一海洋調査における水中ロボットが果たす役割はますます大きくなっている。現在は、科学調査分野から海底油田分野まで遠隔操縦型のROV(Remotely Operated Vehicle)が多方面で活躍しているが、将来的には、自律航行型AUV(Autonomous Underwater Vehicle)による新しい発見や従来は困難だった調査も期待される。
はじめに
海洋は地球環境の調和機能を果たしており、人類をはじめすべての生命を維持する上で欠かせないものである。この大切な海洋の環境を維持しつつ持続可能な形で、海洋を如何に利用していくべきかが今問われている。このため海洋を利用した場合に環境的・社会経済的にどのような影響が生じるのかを事前評価するため、様々な調査が必要となっている。このような海中調査作業には、機動性のある水中ロボットが適している。水中ロボットは、ROV(Remotely Operated Vehicle:有索式遠隔操縦型水中ロボット)とAUV(Autonomous Underwater Vehicle:無索式自律航行型水中ロボット)に大別される。ROVはすでに科学調査分野から海底油田分野まで多方面で活躍しているのに対し、AUVはその自律行動性を活かした新しい調査や、従来は困難だった調査に活躍しはじめたところである。またその優れた経済性(費用対効果)を武器に、従来方式による調査に取って代わりつつある分野も出てきている。
ROVとAUV
ROVは、母船とアンビリカルケーブル(信号線と動力線を有す)で接続されており、母船上のオペレータにより遠隔操縦されるロボットである。目視調査用にカメラだけ搭載した小型ROV(数kg)から、複雑な海底作業が可能な重作業用の大型ROV(数トンから数十トン)まで、潜航深度では数十mから1万mを越すものまで、様々なタイプのROVが活躍している。ただROVは有索であるがため、深海用ではシステム規模が大きくなり、それに見合う母船が必要となるため運用コストが高いものとなる。
一方AUVは、コンピュータと動力源を内蔵し、装備した各種の航行用センサの情報をもとに、外界の状況を判断し自律的に行動する水中ロボットである。浅海、深海を問わずシステム規模が小さく、運用が簡単であり、運用コストもROVに比べ格段に安い。AUVは急速に進化を遂げつつあるが、現時点では、まだそれほど高度な自律行動はできないし、また搭載する動力源(バッテリが多い)の容量の関係から連続航行時間にも制約がある。
AUVの研究開発状況

| AUV「AQUA EXPLORER 2000」(AE2000) |
| ◎最大潜航深度:2,000m |
| ◎最大速力:3 kt |
| ◎連続航続時間:16 hour |
| ◎寸法:3.0L×1.3W×0.9H (m) |
| ◎空中重量:300 kg |
| (写真:国際ケーブルシップ(株) ) |
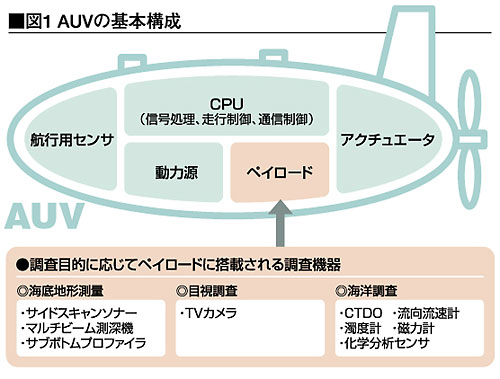
AUVの始まりは、1959年のワシントン大学で開発されたSPURVで、これは決められた潜航行動をする単純な機能のものであった。以来40年余の研究の歴史があるが、ただAUVが実用に耐えうるレベルになったのは最近のことで、それはここ5年ほどのCPUを含むマイクロエレクトロニクス技術、ソフトウエア技術、センサ技術、動力源技術などの急速な発展により搭載する様々な電子機器の小型化、高性能化が実現したことによる。図1は、AUVの基本構成を示したもので、ペイロードの部分に、調査目的に応じた調査機器を搭載することにより、(1)海洋科学・地球科学研究分野での観測(深海底、海底火山域、氷海域)、(2)生物生態観測、(3)環境調査(港湾、沿岸域、湖沼、河川、ダム湖、発電所温排水口海域)、(4)海難事故調査および海中遺失物の捜索、(5)海底ケーブル・パイプライン等の敷設・保守支援、(6)港湾土木工事検査、(7)構造物検査(港湾・沿岸の岸壁・桟橋・突堤、河口・ダムなどの水門)、(8)漁場管理、(9)長期海底設置物の保守点検、等の調査が可能となる。
この10年間に、12カ国で約70台のAUVの研究開発が行われており、経済性の点で既存方式(海洋調査船、ROV、曳航式調査機、有人潜水調査船)に対し優位性を発揮できる調査用途から商用化が始まっている。わが国では、1984年から東京大学生産技術研究所が本格的にAUVの研究を開始し、以来、わが国のAUV研究開発の拠点として、基盤研究から実用的な研究開発まで幅広く展開している。表1に、わが国のAUVを示す。写真は、わが国で唯一の商用AUVであるAqua Explorer 2000 (AE2000)である。
AUVのユーザーとこれから
欧米では、学術的な海洋・海底調査から、環境調査、海底面探査、海底資源・水産資源調査までAUVの活躍分野が拡大しており、AUV専門の製造会社や調査会社も出現している。特に海底石油分野における海底測量やパイプライン調査用に開発された商用AUVが活躍しており、米国のある調査会社は2001年からすでに26,000kmもの海底測量を実施している。
欧米で商用されているAUVは、必ずしも最先端の自律走行機能を有するものとは言えないが、学術的あるいは経済的に最も効果的と考えられるところを狙ってAUVが導入されており、着々と優れた成果を積み重ねつつある。商用中のAUVであっても、未だシステム技術的にも運用技術的にも完成されたとは言いがたくトラブルの発生は避けられないが、数多く運用が重ねられることにより改良され、また新たな工夫が取り入れられ、実用性能が向上していくという発展のサイクルに入っている。
一方、わが国では、残念ながらパイオニア精神を発揮して、AUVによる新しい調査手法による発見や経済性改善に挑戦しようとするユーザーはまだまだ少ない。将来の海中・海底での学術調査・商業調査に占めるAUVの重要性を正しく認識して、先行投資を継続してきた欧米との違いが大きい。わが国のAUVの研究レベルは世界的にもトップレベルにあるが、広く実用するため、研究者・技術者と意欲的なユーザー間のコラボレーションが急がれる。(了)
| 名称 | 開発組織 | 種類 | 目的 | 建造年 | 台数 |
|---|---|---|---|---|---|
| 使用水域 | 開発段階 | 形状 | 空中重量 | 潜航可能深度 | |
| ツインバーガー1号 | 東大生研 | 高機能 | R&D | 1992 | 1 |
| 水槽 | 研究 | 複数容器 | 118kg | 50m | |
| ツインバーガー2号 | 東大生研 | 高機能 | R&D | 1994 | 1 |
| 湖 | 研究 | 複数容器 | 118kg | 50m | |
| アールワン・ロボット | 東大生研・三井造船 | 航行型 | 実用 | 1995 | 1 |
| 海 | 実用運転 | 魚雷型 | 4,000kg | 400m | |
| マンタ・チェルシア | 東大生研 | 航行型 | R&D | 1996 | 1 |
| 水槽 | 研究 | エイ型 | 14kg | 10m | |
| トライドック | 東大生研 | 高機能 | R&D | 1999 | 1 |
| 水槽 | 研究 | 複数容器 | 174kg | 100m | |
| Tam-Egg1 | 東大生研・海技安研・KDDI研・海洋工学研 | 高機能 | R&D | 2003 | 1 |
| 海 | 研究 | 複数容器 | - | 100m | |
| 淡探 | 東大生研・琵琶湖研・国交省・三井造船 | 複合 | 実用 | 2000 | 1 |
| 湖 | 実用運転 | 扁平縦型 | 180kg | 110m | |
| R2D4 | 東大生研 | 航行型 | 実用 | 2003 | 1 |
| 海 | 開発中 | 魚雷型 | 1,600kg | 4,000m | |
| 六合 | 国交省・三井造船 | 複合 | 実用 | 2001 | 1 |
| 湖 | 実用運転 | 扁平縦型 | 220kg | 200m | |
| 水中探査装置 | 国交省・三井造船 | 複合 | 実用 | 2002 | 1 |
| 湖 | 実用運転 | 扁平縦型 | 280kg | 400m | |
| アクアエクスプローラ1000 | KDD研 | 航行型 | R&D | 1991 | 1 |
| 海 | 研究完了 | エイ型 | 500kg | 1,000m | |
| アクアエクスプローラ 2 | KDD研 | 航行型 | 実用 | 1997 | 2 |
| 海 | 商用 | 魚雷型 | 260kg | 500m | |
| アクアエクスプローラ2000 | K-マリン | 航行型 | 実用 | 2000 | 2 |
| 海 | 商用 | 魚雷型 | 300kg | 2,000m | |
| うらしま | JAMSTEC | 航行型 | R&D | 2000 | 1 |
| 海 | 開発中 | 魚雷型 | 7,500kg | 3,500m | |
| MR-X1 | JAMSTEC | 複合型 | R&D | 2000 | 1 |
| 海 | 開発中 | 複数容器 | - | 4,000m | |
| マリンバード | 川崎造船 | 航行型 | R&D | 2001 | 1 |
| 水槽 | 開発中 | 3本魚雷 | 1,300kg | 100m | |
| RAINBOW | 九大応力研 | 航行型 | R&D | 1997 | 1 |
| 水槽 | 研究 | 魚雷型 | 98kg | 10m | |
| バス3号 | 東海大 | 複合 | R&D | 1999 | 1 |
| 水槽 | 研究 | 太胴 | 105kg | 10m | |
| 無名機 | 佐世保工専・長崎大 | 航行型 | R&D | 2000 | 1 |
| 水槽 | 研究 | 太胴 | 75kg | 50m |