Ocean Newsletter
第166号(2007.07.05発行)
- 東京大学生産技術研究所 教授◆浦 環
- 海洋技術フォーラム 深海底鉱物資源タスクフォース◆山崎哲生
- (社)大日本水産会専務理事◆石原英司
- ニューズレター編集委員会編集代表者(東京大学大学院理学系研究科教授・副研究科長)◆山形俊男
海底の地形に名前を付ける
東京大学生産技術研究所 教授◆浦 環そもそも峠とは人が通る鞍部のことであり、これまで海底に峠などはなかった。
しかし、自律型海中ロボットが活躍する今日、海に初めて峠と呼ばれるところが生まれただけでなく、
さまざまな地名の付いた場所が存在する。海中ロボットは同じようなコースを何度も潜るため、
細かな地形に名前があったほうが、複雑な航路計画を立てるときに分かりやすい。
私たちが名付けた海底の地名をいくつか紹介したい。
どうして海底に地名が必要なのか
海底地形図を見れば、大きな地形には名前がついている。例えば、なんとか海山だとかなんとか海底谷だとかである。しかし、細かな地形については海図にはほとんど記述がない。なぜなら、名前を付けても、そこに関心を持つ人がなく、付ける意味がないからである。ところが、浅いところにはいろいろと名前が付けられ始めている。スキューバダイバーたちが潜るときに、一つ一つの岩や谷に名前をつけておけば、再度そこに潜るときに分かりやすいし、いっしょに潜る人に説明しやすい。慶良間諸島の「益田岩」だとか「久場の立柱」などがその例である。
私どもは自律型海中ロボット(自動的に海中を泳ぎ回るロボット:AUVと呼ばれる)を開発して、それを深海に潜らせることを研究の一環としておこなっている。ロボットは同じようなコースを何度も潜っていく。あらかじめ航路計画を立てるときに、細かな地形を縫うようにして進むように計画を立てることが多い。そうなると、潜航区域全体の名称ではなく、細かな場所に名前があれば、皆でロボット行動を検討するときに分かりやすい。
これまで深海へのアプローチは有人潜水艇やROV(ケーブル付き遠隔操縦潜水機)に限られていて、それらは広域を探索しないし、多くの回数そこに潜航することはないので、ある目標地点にのみ名前がついていれば十分であったように思われる。しかし、自動ロボットであるAUVは頻繁にその海域を広く潜ることができるので、状況が違ってくる。一つ一つのピークや谷にあらかじめ名前をつけておきたい。
明神礁・逆潮峠では強い潮の流れにご注意
2005年8月、われわれの最新鋭ロボット「r2D4」は明神礁カルデラに6回潜航した。2008年3月に再度潜航する予定である。明神礁に名前がついているのは、中央火口丘が高根礁と呼ばれているだけのようである。これでは、ロボットが通ったコースをうまく伝えられない。そこで、図1のようにカルデラの外輪山とその内側の特徴的な場所に勝手に名前を付けてみた。
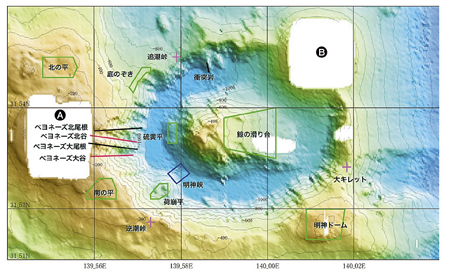 | ■図1 明神礁カルデラの命名。深度データは、JAMSTEC所属「かいれい」KR05-11航海の時にマルチナロービームソナーより取得。カルデラ西側の空白Aには、ベヨネーズ列岩があり、北東の空白Bは1952年に噴火した火山がある。 |
命名には、命名者のセンスが問われるので、いろいろと考えを巡らせねばならない。図1は、地形とそこでおこなわれたロボットのイベントに結びつけた結論である。
ロボットは8月19日、北の平から潜航を開始して、底のぞきまで下り、そこからカルデラの中へと南下し、ベヨネーズ北尾根、同北谷、同大尾根、同大谷を越え、荷崩平の手前でUターンしてカルデラ内を二往復し、硫黄平で鉛直下降をおこない海底に接近し、追潮峠の手前で右に曲がった。しかし、コースが北に少しずれたために、急峻な衝突岩に接触してしまった。
8月20日、南の平から潜航を開始し、水深300mの逆潮峠にさしかかった。ここから荷崩平を経て明神峡を調査する予定だったが、峠では南に流れる潮が強く、30分ぐらいがんばってみたが、前進困難と判断し、それ以降の潜航をあきらめ、帰還した。
南インド洋・東西ブリジッド丘の間を抜けて
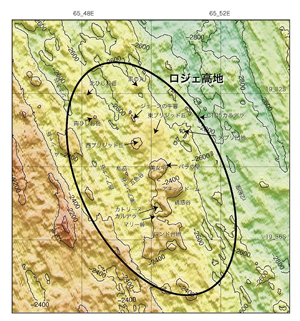
2006年12月、「r2D4」は南インド洋中央海嶺のセグメント15に出かけていった。その詳細な地形は、白鳳丸のマルチナロー測深器であらかじめ計測している。熱水活動が期待されるセグメントの中央部ロジェ高地(われわれの命名)の周辺を潜航した。ここの地形はとても複雑であり、様々な潜航パタンがロボット技術を向上させるために試みられた。その地形から、クルーズメンバーは昼食時に話題になった映画俳優にちなんで、図2のように名前を付けた。
第30潜航の計画は、次のようなものである。水深2,500mのジェーンの牛首を経由して、東西ブリジッド丘の間をサイドスキャン計測しながら美女平へ至り、そこから西に進んで私岳の間を徐々に南下しながら三往復して、五色谷内の水の観測とサイドスキャン計測をおこなって、次いでアネッタドーム中央を南下し、誘惑谷のカール内へとバンジージャンプする。第29潜航でマリー峠からr2船窪あたりは観測しているし、時間の制限もあるのでカトリーヌカルデラやロジェ高地の南端のロンド台地へは行かず、それより北側で浮上する。実際には、「r2D4」は美女平の東側の切り立ったバラの壁をよけきれずに衝突し、それ以上進むのを諦めて浮上してきた。翌日の第31潜航では西側のアンナ谷を攻めた。
これまで海底には峠はなかった。峠は人が通る鞍部のことであり、海の中の峠は軍用の潜水艦にしか用のない呼称であった。しかし、自律型海中ロボットが活躍する今日、海に初めて峠と呼ばれるところができたのである。
さあ、海底の微地形に名前をつけてそこにロボットを潜らせよう。(了)