Ocean Newsletter
第140号(2006.06.05発行)
- 東京大学生産技術研究所教授◆浦環
- 東京大学産学連携本部特任教授◆堀雅文
- (独)海洋研究開発機構 地球環境観測研究センター Argoグループ◆吉田昌弘
- ニューズレター編集委員会編集代表者(東京大学大学院理学系研究科地球惑星科学専攻教授)◆山形俊男
深度4,000m用フロートの開発
(独)海洋研究開発機構 地球環境観測研究センター Argoグループ◆吉田昌弘常時3,000機のフロートを用い、地球全体の海洋上層を観測することを目指した前例のない大規模な国際プロジェクト「ARGO計画」が進められている。
しかし、現行フロートでは水深2,000mまでしか観測できないため、海洋の深層を直接観測することはできない。
海の平均深度は約3,800mである。4,000mまでの海洋調査・観測を可能にする「多種類のセンサ搭載可能な大深度用フロートの開発」を提案し、その有効性を述べたい。
はじめに
地球は「水の惑星」といわれ、表面の70パーセントは海で覆われているが、「大気の1,000倍もの熱容量をもつといわれる海洋の変動は、地球温暖化に対してどのような影響をもたらすのか?」、また「深海ではどのような生物が生息して、どんな生活をしているのか?」などいまだに多くの謎につつまれている。
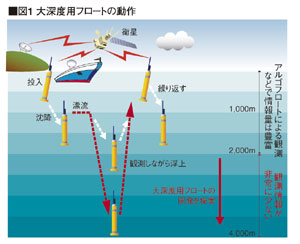
近年、常時3,000機のフロートを用い、地球全体の海洋上層(0~2,000m)を観測することを目指した前例のない大規模な国際プロジェクト「ARGO計画」(http://www.jamstec.go.jp/ARGO/J_ARGOj.html)が進められている。私の所属している海洋研究開発機構 地球環境観測研究センター Argoグループはこの計画に参画し、国際的にも主要な役割を担っている。ARGO計画で用いられているフロート(図1参照)は、0~2,000mの海洋を周期的に沈降/浮上しながら水温、塩分、圧力データを衛星経由でほぼリアルタイムで3~4年間取得できる、費用対効果に優れた自動観測ロボットである。現在、約2,400機のフロートが展開されており、海洋上層の水温塩分構造は徐々に明らかにされつつある。
しかし、海の平均深度が約3,800mであるのに対して、現用フロートは2,000mまでしか観測できない。それより深い場所の観測は、依然として、船舶や深海係留系などに頼っているため、その情報量は桁違いに少ない。気候変動を明らかにするためには、海洋の深層循環(4,000m程度)を直接観測することが必要なのでは? との声も挙がりはじめている。
本稿は、4,000mまでの海洋調査・観測を可能にすべく「多種類のセンサ搭載可能な大深度用フロートの開発」を提案し、その有効性を述べる。本提案が実行されれば、これまで不可能であった深海に対して、長期無人自動観測が世界で初めて可能となる。
まったく新しい浮力制御機構を用いたフロート
一般にフロートは、体積の増減により沈降・浮上する。これまでに登場したフロートの体積増減方法は、2種類に分けられる。
一つは、シリンダによって体積を増減させる方法である。モータを正転させるとシリンダの油は押出され、モータを逆転させるとシリンダに油は引き込まれる。この方法は、信頼性が高い反面、体積変化量に制限があるため多種類のセンサが搭載できない。
もう一方は、ポンプを用いた方法である。ポンプを駆動させると、油は押出され、体積が増加する。バルブを開放すると、油はフロート内部に入り、体積が減少する。この方法は、体積変化量に制限がないため多種類センサが搭載可能な利点をもつ。しかし、バルブによる深度制御が容易でない。
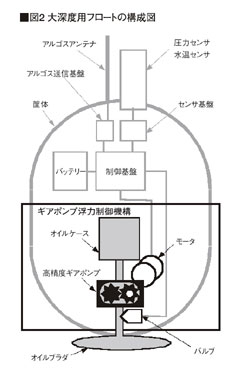
私は、将来性を考えるならば、バルブ問題を解決可能なポンプタイプの浮力制御機構を開発すべきと判断した。熟考の末、私は高精度ギアポンプに高粘性オイルを用いてフロートを沈降・浮上させるための浮力制御機構を採用した(図2参照)。本機構を用いたフロートの沈降・浮上動作を説明する。フロートを浮上させるには、モータを正転させるだけでよい。なぜなら、モータはギアポンプと直結しており、オイルケース内の油はギアポンプを介してオイルブラダに排出されることで、フロート体積は増加し浮上するからである。逆にフロートを沈降させるためには、モータを逆転させて体積を減少させればよい。また、フロート体積を変化させない場合は、バルブを閉じる。いいかえれば、モータの正逆回転とバルブの開閉によって、深度制御が可能となる。一方、懸念されているバルブの深度制御に関して、ギアポンプは外圧との圧力差を吸収することで、バルブ開閉は容易になり、故障頻度が少なくなる。また、浮力制御機構の心臓部であるギアポンプの改良には、高い技術力をもつ日本の中小企業の協力を得ることができた。その結果、浮力制御機構の部品は少なくなり、小型化・軽量化にも成功した。この浮力制御機構は、「浮沈フロートおよび浮沈フロートの使用方法」と題して特許出願中であり、国際的な特許(PCT出願)も出願中である。
大深度フロートの特徴とその将来性
本浮力制御機構の最も大きな特徴は、フロート内外の油袋(オイルケース、オイルブラダ)を大きくすることにより、大きな浮力のゆとりをもたせることが可能なことである。したがって、開発中のフロートは、将来的に多種類のセンサを搭載可能なプラットフォームとして大活躍するであろう。例えば、海洋学の研究分野では、水温、塩分、圧力、酸素、二酸化炭素、乱流、音速、マイクの集音による降雨や風速観測など様々なセンサを搭載可能なプラットフォーム用フロートが可能になり、海洋生物学の研究分野では、ビデオカメラを搭載した深海生物観察用フロートが可能となると予想する。観測目的が合致すれば、様々な研究分野で連携した観測も可能になると考える。
本稿は、現在海洋研究開発機構で開発中の非常に拡張性の高い2,000m用フロートに対して、大きな改良を加えることで世界に類のない「多種類センサ搭載可能な大深度(4,000m)用フロート」の開発を提案するものである。本提案が実現すれば、2,000m用フロートでは観測できなかった様々な情報が次々と入手でき、世界のあらゆる海洋の分野の研究者などに対して貢献度は計り知れなく、従来の観測概念も覆すことになると考える。さらに究極的な目標として、限りなく全海洋(0~10,000m)を解明するための長期無人観測可能なフロートの開発に挑戦したいと考えている。
おわりに
日本が「海洋立国」や「技術立国」を標榜しているにもかかわらず、多くの海洋観測機器が、輸入品もしくはその改良型であり、日本オリジナルの機器は意外に少ない。大深度型フロートの開発は、日本の威信に賭けても是が非でも行うべきプロジェクトと強く考える。世界に対して改めて日本の技術開発力が高いことをアピールするとともに、日本が海洋で先導的立場を取るためにも、本提案の実現に理解と協力をお願いしたい。(了)