Ocean Newsletter
オーシャンニューズレター
第571号(2024.05.20発行)
PDF
2.2MB
海中ドローンによるブルーカーボン調査
KEYWORDS
海中ドローン/藻場/3Dオルソ画像
長崎大学副学長、海洋未来イノベーション機構教授◆山本郁夫
海中ドローンにより海の可視化ができるようになり、海の環境保全や海中二酸化炭素の吸収に役立つとされる藻場の観測への期待が高まっている。
山本研究室では海中ドローンを開発しており、アマモ場を対象として、藻場の3Dオルソ画像収得と海中環境パラメータの把握を行った。
この取り組みは可視化による海の環境保全のみならず、ブルーカーボンクレジットの算出にもつながると期待されている。
山本研究室では海中ドローンを開発しており、アマモ場を対象として、藻場の3Dオルソ画像収得と海中環境パラメータの把握を行った。
この取り組みは可視化による海の環境保全のみならず、ブルーカーボンクレジットの算出にもつながると期待されている。
海中ドローンと機能
海中ドローンとは海の中を航走する無人潜水機を指し、ケーブル付きの遠隔操作型ROV(Remotely Operated Vehicle)やケーブルなしで自律航走が可能なAUV(Autonomous Underwater Vehicle)が代表的である。長崎大学山本郁夫研究室では、ROVの開発に長年取り組んでおり、近年開発したAI(Artificial Intelligence)機能を搭載したROVであるREMONA(図1左)について紹介する。REMONAは重量18kg、長さ40cm、幅45cm、高さ28cmでスラスタを8基装備し、6自由度の機敏な運動機能を有する。稼働時間は3時間で深度50m、速力1.5m/secで航走する。前方と下方に設置されたステレオカメラにより、撮像体との距離、方位の測定が可能で、対象物の高分解能モニタリングを行うことができる。搭載カメラの映像を用いて対象物の特徴点を算出し、オプティカルフローとROVの推進制御機能によって観測対象を追従し続けるものとなっている。オプティカルフローとは、動画中における2枚の隣接した画像間フレームにおいて、移動前の画素と移動後の画素をベクトルで示したものである。下部カメラによる観測では、主に海底藻場等の生態系調査と海底ケーブル等の洋上風力発電インフラ点検が可能となる。カメラで捉えた画像のフレームグリット化をリアルタイムで行い、AIにより特徴点を検出する。検出した特徴点をオプティカルフローによって観測対象を追跡する。追従制御と定点保持制御をREMONAのスラスタにて行うことにより、図1右に示す通り、潮流下での安定したカメラフレーム内の観測対象の捕捉が可能となる。海中ドローンは一般に陸上から直接海中に投入して使用するが、ケーブルの制約等の影響で船舶に搭載して海中投入することも多い。山本研究室では後述の船ロボットと連動して海中モニタリングが可能な複合型海洋モビリティを開発し、実海域で運用している。
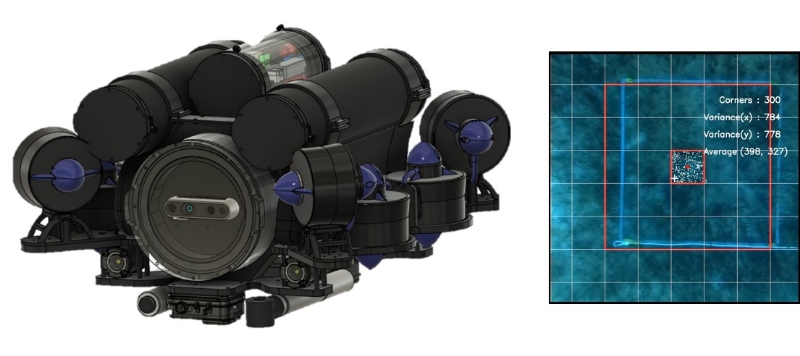
■図1 ROV/REMONAと観測対象の捕捉画像
藻場によるブルーカーボン創出
地球温暖化の原因とされる二酸化炭素などの温室効果ガスの増加が問題となっており、森林や海洋での二酸化炭素吸収が期待されているが、近年とりわけ海洋の二酸化炭素吸収能力に注目が集まっている。沿岸の海洋生態系におけるバイオマスや海底土壌に蓄積する炭素のことを一般にブルーカーボンと称するが、具体的な場所として藻場、干潟、塩性湿地、マングローブ林などが挙げられる。日本ではその中でも、藻場の維持と増加による磯焼け対策とブルーカーボン創出が期待されている。海藻が海中二酸化炭素を吸収できることから、二酸化炭素排出量を減らしたい事業者との間でクレジットを売却したり、有効活用するといったブルーカーボンクレジット取引が注目されている。クレジット購入者は二酸化炭素等温室効果ガスの削減や環境保全への取り組みを支援することにより企業価値が向上する。クレジット申請者は藻場の評価や育成を行っていかなければならない。評価法として、藻場の種類や量の調査を始めなければならず、海中ドローンが有効である。
海中ドローンにより藻場を撮影、画像解析を行うことにより、海中の藻場の定量的状態を把握でき、そのデータはブルーカーボンクレジットの算出につながる。また、洋上風力発電などの海洋再生可能エネルギーの進展がブルーカーボン創出につながり、海中ドローンによる洋上風力発電水面下構造物や海底ケーブルのモニタリング検査が施工前、建造時、施工後のあらゆるフェーズで重要となる。REMONAでは正面ステレオカメラにより前方構造物との距離を測定でき、検査構造物の傷を教師データとして搭載コンピュータの中で学習しておけば、傷画像を装備したカメラで自動抽出し、スラスタ制御により潮流下でも捕捉画像を捉え続けることが可能である。このように海中ドローンはさまざまなブルーカーボン創出ミッションにおける観測や現状把握に貢献できる。
海中ドローンにより藻場を撮影、画像解析を行うことにより、海中の藻場の定量的状態を把握でき、そのデータはブルーカーボンクレジットの算出につながる。また、洋上風力発電などの海洋再生可能エネルギーの進展がブルーカーボン創出につながり、海中ドローンによる洋上風力発電水面下構造物や海底ケーブルのモニタリング検査が施工前、建造時、施工後のあらゆるフェーズで重要となる。REMONAでは正面ステレオカメラにより前方構造物との距離を測定でき、検査構造物の傷を教師データとして搭載コンピュータの中で学習しておけば、傷画像を装備したカメラで自動抽出し、スラスタ制御により潮流下でも捕捉画像を捉え続けることが可能である。このように海中ドローンはさまざまなブルーカーボン創出ミッションにおける観測や現状把握に貢献できる。
長崎五島での実験
藻場のデータ収得を目的に長崎県南松浦郡新上五島町有川郷沖にてアマモ場を観測対象として、ROV/REMONAおよびROVに接続したASV(Autonomous Surface Vehicle)との複合型海洋モビリティにより藻場観測実験を行った。図2左に示すように、ASVはGPS(全地球測位システム)により位置情報を得て、自律して海面を航行する。REMONAはASVに格納搭載し、観測海域にてASVから海中に離脱し、観測後帰還し収納される。潮流下でも設置した撮像フレームがREMONAの下部カメラの視野角から外れることはなく、定点保持観測と動画像の取得を行うことができた。観測された藻場映像は図2右に示すように、3Dオルソ画像※1化を行い藻場の面積、体積を算出できる。なお、本実験ではASVに二酸化炭素センサーを設置し、藻場の海中二酸化炭素量の計測も試みた。従来、藻場の計測は潜水士が行っているが、人が潜ると危険な海象気象条件の悪い場合でも海中ドローンは観測ミッションの遂行が可能で、定時・定点での観測データを収得できることが利点と考える。さらに、藻場の3Dデジタルデータの収得は海洋デジタルツイン化※2につながり、コンピュータにデータの集積を行っていけば、ブルーカーボンクレジット創出を支援する有効な先駆け的手法となると確信する。
今後、海中ドローンはAIや制御系の高度化により自律運動性をさらに高めていく所存である。また、海中光通信等の活用により海中ドローンが収得した大容量データを高速で安定して送る仕組みを確立していきたい。さらに、藻場観測時にプロペラ回転により海水が攪拌されるので、魚のヒレのような動きができる振動翼推進システムの適用、すなわち魚型ドローンの開発が環境データ収得に必須となると思う。(了)
今後、海中ドローンはAIや制御系の高度化により自律運動性をさらに高めていく所存である。また、海中光通信等の活用により海中ドローンが収得した大容量データを高速で安定して送る仕組みを確立していきたい。さらに、藻場観測時にプロペラ回転により海水が攪拌されるので、魚のヒレのような動きができる振動翼推進システムの適用、すなわち魚型ドローンの開発が環境データ収得に必須となると思う。(了)
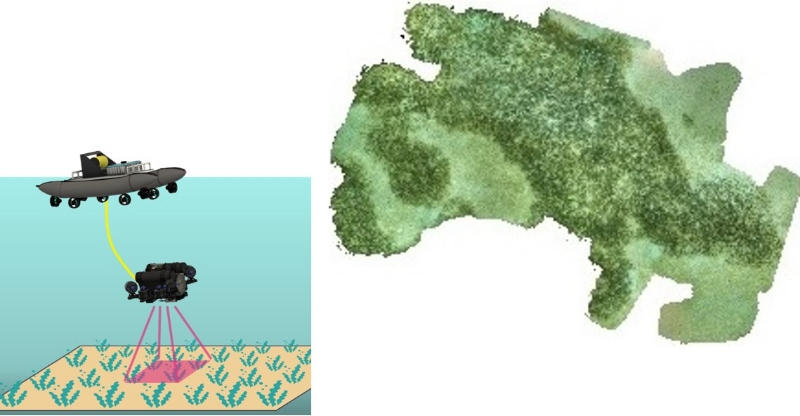
■図2 ROV/REMONA撮像の藻場3Dオルソ画像
※1 3Dオルソ画像 : 衛星写真などの写真を複数つなぎ合わせや歪みを補正したり、座標値を付与させるなどし、空中写真をデジタル画像として作成されたもの
※2 デジタルツイン化 : 現実空間にある情報をIoTなどで集め、そのデータを元にサイバー(仮想)空間でリアル空間を再現する技術
●(一社)カーボンリサイクルファンド他、本研究に御支援頂きました皆様に感謝の意を表します。
※2 デジタルツイン化 : 現実空間にある情報をIoTなどで集め、そのデータを元にサイバー(仮想)空間でリアル空間を再現する技術
●(一社)カーボンリサイクルファンド他、本研究に御支援頂きました皆様に感謝の意を表します。
第571号(2024.05.20発行)のその他の記事
- 海中ドローンによるブルーカーボン調査
- 魚の空腹度に応じたAIドローンによる自動給餌 ~育てる漁業のための取り組み~
- 水上ドローンがもたらす新たな大航海時代
- 事務局だより