Ocean Newsletter
第544号(2023.04.05発行)
自律型無人潜水機AUVの開発と将来展望
[KEYWORDS]水中ロボット/水中調査・探査/無人化・省力化(国研)海上・港湾・航空技術研究所海上技術安全研究所海洋先端技術系長◆藤原敏文
昨今の要素技術開発の進展に伴って、水中調査・探査における自律型無人機(AUV)の活用が広がってきた。
省力化、安全性確保等の観点から今後も活用方策の広がりが予想される。
AUVの技術発展に関する概説とAUV開発と運用の現在、さらに今後の発展に関する期待について述べる。
水中の自律型無人機
日常生活で普通にロボットが活躍する時代となってきた。家ではお掃除ロボットが塵やごみを吸い込み、人を介した宅配に代わり無人航空機、いわゆるドローンが荷物を玄関先まで届ける状況が実現できる世の中になりつつある。これらの無人機は、一般的に周りの状況を認識するセンサー、自身の位置・状態を認識する慣性航法装置、これらの機器から得られる情報を集約し、次の行動を決定する演算装置、目標動作を実現するための駆動用モーターと車輪などの駆動装置、動力源となる電源ユニット、目的作業を行うためのマニピュレータといった関連機器で構成される。この30~40年ほどの間に演算装置が発展し、高額な大型のワークステーションによる計算処理を要した状況から、手のひらサイズで安価なCPU(中央演算装置)ボードで実施できる状況となった。そのほかリチウムイオンに代表される高効率の電池や低電力で起動できる小型・高出力のモーターの開発等、さまざまな要素技術が格段に進展した。
海の世界においても従前から海中ロボットの開発が行われてきたが、この20年間における小型化の進展は目覚ましい。海中観察・観測の初期段階では有人の潜水調査機が世界的に開発された。わが国では、(国研)海洋研究開発機構(JAMSTEC)が所有する「しんかい6500」※1が有名である。深度6,500mまで潜航でき、最大3名乗員可能である。そのため、全長約10m、空中重量約27tと大型の機器となっている。その後、簡便に遠隔から操作や観測をしたいとの要望から、電力・通信ケーブルで繋がれて遠隔で操縦・観測可能なROV(遠隔操作型有索潜水機)、索(ロープ・ワイヤー等)が無く完全自律で水中を探索するAUV(自律型無人潜水機)、ASV(自律型洋上探査機、洋上中継機等の呼称)の開発が急速に進んでいる。これらの進展は、先に言及した個々の構成要素機器の性能改善に起因するが、海域・海中構造物の観測や海域利用のための状況把握といった社会ニーズの増大によるところも大きい。また、人が関与する場合、少し海が荒れた状態になると安全性の観点から海中作業の中断が余儀なくされる。人命リスクの存在する水中作業を無人で実施したいとのニーズは、今後ますます増大していくと思われる。
(国研)海上・港湾・航空技術研究所の港湾空港技術研究所ではコンクリート製等の水中構造物の点検作業を無人で行うべくROV開発を、筆者が所属する同海上技術安全研究所(以下、海技研)では、海洋資源開発や海洋環境モニタリングの観点からAUV開発を行っている。
AUV開発・運用の現在
 海技研が開発した深度2,000m級のNMRI航行型AUV3号機(長さ3.9m重量545Kg)
海技研が開発した深度2,000m級のNMRI航行型AUV3号機(長さ3.9m重量545Kg)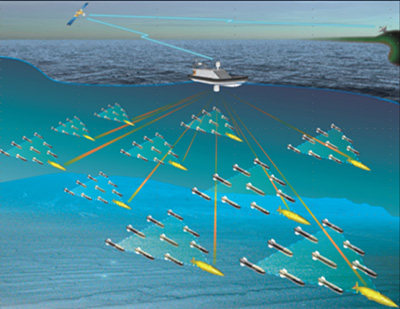 将来の複数AUV大規模運用のイメージ
将来の複数AUV大規模運用のイメージ
海域での石油資源開発等の社会ニーズと相まって、欧米ではAUV開発が盛んに行われており、製品化対応も進んでいる。個々の搭載・観測機器についても、現状その多くは海外製品に頼らざるを得ない。
海技研では、今後採掘が必要とされる海底熱水鉱床(海底から噴出する熱水に含まれる金属成分が沈殿してできた鉱床。銅、鉛、亜鉛等を豊富に含む)の探索を可能とするAUVを複数機開発した。運用を容易とするために20ftコンテナに収納できる長さ4mサイズとし、小型・軽量化を図りながら操縦性能を向上させるため艇体形状をCFD(数値流体力学)計算により最適化させた。その際、必要とする機器性能、許容容量などの関係から、選定した主要機器、すなわち音響通信装置、音響測位装置、慣性航法装置、音波を利用して海底地形の形状を観測するマルチビーム音響測深機は、全て海外製品に頼らざるを得なかった。また、それらの機器を接続するための耐水・耐圧接続ケーブルやコネクタに関しても海外製である。推進機に関しても一部国内製を使用しているが、主として利用しているものは海外製である。耐圧深度2,000mといった深海対応の機器であるが故にといった点もあるが、一日の長として、海外製品は価格・性能面で優位であることも事実である。結果として調達に半年以上かかる、修理も海外への輸送を伴う等、余分な工程や費用を必要とする。これらの海外製品を多く組み合わせながら潜水艦建造実績のある重工メーカーや一部製造会社が国内のAUV開発・製造を何とか担っているのがわが国の現状と言える。他方、今後の将来性を見据え、高速音響通信技術、光通信技術による機器開発等、国内の研究機関、企業による取り組みも見られるようになってきた。経済安全保障、また国防的観点からも国内で高度な自律型無人機を製作できる体制が望まれる。
AUVの運用面においても解決すべき課題は多い。AUVの投入・揚収に関して、人手を要する場合が多い。特に揚収時では、吊り上げの索をAUVに結合させるため、ダイバーや小型ボートで接近、索結合を行う手段が通例である。AUV投入後の時間経過に伴う気海象状況を予測し、揚収が問題なく行える状況を把握した上でAUV運用を行うため、大洋上での非常に限られた穏やかな海象下を狙った運用にならざるを得ない。海技研では、この短い運用時間で調査効率をあげる目的から、AUV複数機同時運用の技術開発を行ってきた※2。他方海外では、先行的に投入・揚収装置の開発も行われているが、まだ「この装置さえあれば」と言った決定的なものは存在しない。荒天状況が頻繁にあり、海流も速い日本近海では、より高度な性能が要求される。このAUV投入・揚収作業の負担を軽くする方策として、水中での長期運用を目指したAUVの水中充電に関する技術開発が一部行われているが、実運用でその有効性を証明するに至っていない。
このような状況であるが明るい話題として、AUVによる海底探査の国際コンペティション「Shell Ocean Discovery XPRIZE」(2015-2019年)にTeam KUROSHIO(JAMSTEC、海技研、ほか6機関のメンバーで構成)として挑戦し※3、15カ国から32チーム参加した中、準優勝できたことは特筆に値する。技術課題を克服し、限られた時間の中でミッションを解決するといった総合力に関しては、世界的にも優れていることを証明した。
今後の展望
わが国は海に囲まれ、広大なEEZ(排他的経済水域)を有していることは、周知の事実であるが、有効に利用しているとは言い難い。海底資源探査、海洋環境調査や国防的な観点も含めたMDA(海洋状況把握)、今後進展が想定される洋上風力発電施設、漁業関連施設等の海上・海中点検に際して、人手に頼らず、簡易に調査・監視を行いたいとのニーズは今後益々増大すると考えられる。これは国内に限った話ではなく、世界規模での市場開拓が可能であるとも言える。世界中から優れたものを取り寄せ、組み立てるのみの安易な手段では国内の技術進展は望めない。先んじたアイデアを取り込み、国内技術を有効活用、また改善を行いながら、地道に技術開発を発展させることが必要である。(了)
- ※1JAMSTEC、有人潜水調査船「しんかい6500」、
https://www.jamstec.go.jp/j/about/equipment/ships/shinkai6500.html - ※2海上技術安全研究所、海上技術安全研究所報告第21巻第4号、
https://www.nmri.go.jp/study/intellectual/paper.html 、2022 - ※3Team KUROSHIO(JAMSTEC)
https://www.jamstec.go.jp/team-kuroshio/history/
第544号(2023.04.05発行)のその他の記事
- 「さかなの日」の制定について
- 自律型無人潜水機AUVの開発と将来展望
- ジオパークで佐渡島を学び、楽しむ
- インフォメーション
- 編集後記