Ocean Newsletter
第526号(2022.07.05発行)
海中IoTの実現に向けて─水中光無線通信
[KEYWORDS]水中IoT化/可視光/水中光WiFiステーション(株)島津製作所航空機器事業部磁気装置部部長◆西村直喜
カーボンニュートラルの達成に向けて洋上風力発電を代表とする海洋エネルギー分野への関心が高まるなか、今後、海洋の開発を効率よく進めていくためには、海中の状況が手に取るようにわかるようにするための水中IoT化(見える化)が必要である。その実現のために必須となる水中における高速無線通信手段の整備のため開発を進めてきた水中可視光無線通信技術について、ご紹介する。
水中における高速通信の必要性
海洋の開発を進める際、現状は、「船舶、潜水船、水中ロボット」を使った観測により、水中カメラによる映像、音響測深機等による地形データ、水温、濁度、電気伝導度、塩分などのデータを取得するのだが、これらのデータを海中からリアルタイムに通信するためには、これまでは、ケーブルによる有線通信か、音響による無線通信が主流であった。有線通信ではインターネット同様の通信速度を得られるが、潜水船または水中ロボットが船舶と有線で接続されているため、それらの行動範囲が制限されてしまう。そこで、水中ロボットを邪魔なケーブルから解放するために、ケーブルレス化=無線化の必要性が出てくる。従来から利用されている音響による無線通信速度は、1秒間に送受信が可能なデータ量が~0.1Mbpsと低速であり、高解像、高時間分解能の観測データをリアルタイムに陸上へ伝送することは、データ圧縮技術を用いても難しい。そこで、音響以外の他の手段、電波、光波等の電磁波を、その水中での伝搬特性を踏まえて利用していくことが求められる。
水中での電磁波の伝搬特性(図1)から、電磁波のなかでは可視光、とくに青色~緑色あたりの波長が水中での透過率が高い。すなわち、純粋な水の物理特性では、青色~緑色光での通信が一番遠方に通信できることを示している。
2016~2017年度にかけて、弊社はJAMSTECの研究者とともに、青色、緑色レーザを用いた水中可視光無線装置の実証機開発および試験を行なった。レーザを採用した理由は、窒化ガリウム(GaN)可視光半導体レーザの高性能化により、高速化、小型化、低消費電力化が可能になったことが挙げられる。特に、小型化、低消費電力化は水密容器内での限られた空間内におけるレイアウトの自由度、放熱性に寄与する。加えて、可視光通信の宿命である太陽光等の外乱光の影響を受けやすい点に関しても、レーザの発光波長幅の狭さ(発光ダイオード比10分の1程度)から、光学系を工夫することで、外乱光を除去しやすいデバイスといえる。
成果としては、2017~2018年にかけて、JAMSTEC保有の無人探査機「かいこう」を用い、移動体間において通信距離120mで通信速度20Mbpsを達成した。この成果により当時、水中のIoTインフラが構築可能であることを実証した。
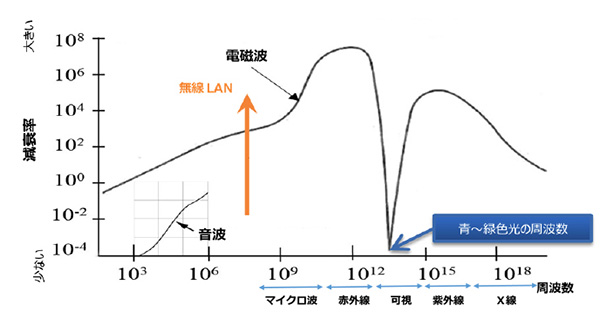 ■図1 水中における電磁波の伝搬(減衰)特性
■図1 水中における電磁波の伝搬(減衰)特性
高速通信の開発・製品化に向けて
 ■図2 水中光WiFiステーションを、海底油田設備に設置したイメージ。水色の半球で示された部分が、光WiFiエリアを示す。
■図2 水中光WiFiステーションを、海底油田設備に設置したイメージ。水色の半球で示された部分が、光WiFiエリアを示す。
(株)島津製作所ではこの研究成果を基に製品化を進めている。2020年2月に、海底ステーションと水中ロボット間の通信を主目的とした短距離通信装置(通信速度95Mbps:通信距離10m)を発売。また、水中ロボット間通信を主目的とする中距離通信装置(通信速度20Mbps:通信距離80m)を2022年6月に発売した。これらの装置は、いずれも主に水中ロボットに搭載することを主目的とした装置であるが、通信をする相手としては、水中ロボットであったり、水上艇であったり、海底に設置されたステーション等が想定される。相手方が水中ロボットおよび水上艇の場合は、前述の水中ロボット自体の向きを変えることで、通信方向を調整しロックオンが可能であるが、水中ロボットと水中ステーションの間においては、ステーション側は固定局となるため、何らかのロックオン機構を設けるか、陸上におけるWiFi基地局のように、ステーションを中心とした全方位で通信可能なエリア(図2)を設けて、移動局側との通信を継続できる仕組みが必要である。
海底に置かれたステーションについては、2019年より、日本財団-DeepStar連携技術開発助成プログラムのサポートを得て、基地局を中心とした全方位を通信エリアとする水中光WiFiステーション(全周囲型水中光無線基地局)なる構想で開発を進めている。2022年春からは、長崎海洋アカデミーによる海洋実験実証フィールドを用い、実海域でのデータ取得を本格化させる。
水中光無線の今後の課題
今後、日本においては、浮体式洋上風力発電、大規模養殖等の沿岸部における開発が活発化するものとみられるが、沿岸部および浅海部においては、四季の変化におけるプランクトンの発生量の違いから生じる透過率の変動、陸上からの土砂の流入による透過率の低下等で、通信距離に大きな影響を及ぼすことが課題である。通信光を切り替えることで、ある程度の改善はみられるが、抜本的な改善は期待できない。打開策としては、他の通信方式、例えば音響通信方式との併用が考えられるが、水中ロボットに搭載する際は、いかに小型化、低コスト化、低消費電力化ができるかが課題となる。最適な設計を行うためには、搭載する水中ロボットの能力を考慮しなければならないため、水中ロボットメーカとともに、実海域での試験で有効性を確認していくことが望ましい。
また基地局については、敷設、揚収、および点検手法の確立および、海生生物が付着した場合の通信性能への影響、除去方法等を確立する必要がある。社会実装できるまでに課題はあるものの、今後、多様化する水中のセンシングニーズに対応するために、高速無線通信は必須の技術となると思われる。図3に国内におけるセンシングニーズの一例と、水中光無線を組み合わせたイメージを示す。これらを推進することで、弊社の経営理念である“「人と地球の健康」への願いを実現する”とともに、将来の子孫のために「2050年カーボンニュートラル宣言」の達成に向け、あらゆる努力を続けたいと考えている。(了)
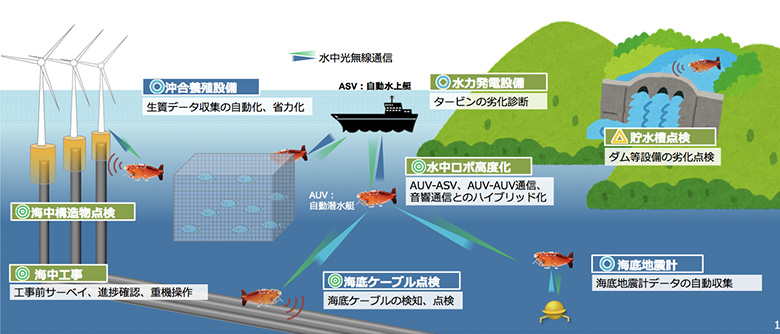 ■図3 水中におけるセンシングニーズの例
■図3 水中におけるセンシングニーズの例
第526号(2022.07.05発行)のその他の記事
- 海中IoTの実現に向けて─水中光無線通信
- ここまで分かったウミウの繁殖生態〜宇治川鵜飼のウミウの産卵、その後〜
- 博物館におけるデジタルの活用と深化
- 編集後記