潜水艦救難と脱出:潜水艦乗組員の安全のために
Contents
1.はじめに
2017年11月、アルゼンチン海軍の潜水艦「サンファン」が沈没し、乗組員44名が犠牲になったことは記憶に新しい。2000年8月にはバレンツ海で訓練中のロシアの原子力潜水艦「クルスク」が沈没し、米英、ノルウェーから潜水艦救難艇の派遣などの支援の申し出があったが、ロシアが拒否したため、118名の命が失われた。
また、1963年に沈没した米原子力潜水艦「スレッシャー」のように潜水艦が水圧によって押しつぶされてしまうような水深より浅い海域で事故が発生し、潜水艦が沈没した場合、乗員は艦内で生存している可能性がある。「クルスク」の場合もそうであった。単純化して言えば、この生存する乗組員をいかに救出するかが、潜水艦救難である。
日本で最初の潜水艦事故は、1910年4月に国産潜水艦の第1号である第6潜水艇が岩国沖におけるガソリン潜航訓練中に沈没、艇長佐久間勉大尉以下14名が殉職した事故である。潜水艦救難の視点から特筆されるのは、1924年、演習に参加していた第43潜水艦が佐世保沖で沈没、7時間後に救助隊と通信設定を行った後、13時間にわたって通信が維持されたにもかかわらず、海上模様等のために救助活動が進展せず、乗組員全員が殉職した事故である。査問委員会が提出した報告書は「適当なる救難設備を予め準備し置く要あり」と述べている。
ただ、日本に限らず、世界で沈没潜水艦から乗組員を救出する方法は、潜水艦救難用チャンバー(Submarine Rescue Chamber:以後、チャンバーと言う)が出現するまでサルベージしか手段はなかった。サルベージは成功すれば一度に多くの乗組員を救出できるが、作業に時間がかかり、気象海象に大きく影響されるという欠点があった。
2.潜水艦救難用チャンバーの出現
上述のような状況に革命的な変化をもたらしたのがチャンバーである。1925年に米潜水艦S-51が沈没、艦内に生存者がいるにもかかわらず救助することができず、結局33名の乗組員が失われ、潜水艦救難構想が生まれる。その2年後の1927年、R-4潜水艦で40名の乗員が窒息死するに及んでチャンバーの開発が開始される。中心的役割を果たしたのがCharles “Swede” Momsen大尉(当時)である。彼の開発したチャンバーは、1939年に発生した潜水艦「スクォーラス」の事故において、71mの水深から23名の乗組員を救出することで、その実力を発揮する。その結果、チャンバーは各国海軍に広まり、海上自衛隊では1961年にはチャンバーを搭載した潜水艦救難艦「ちはや」を就役させ、呉に配備した。さらに1970年には「ふしみ」が就役し、横須賀に配備され、常に潜水艦の救難体制を維持することができるようになった。
チャンバーは、丁度お寺にある釣り鐘のような形をしており、これを母船から沈没した潜水艦の脱出用のハッチの真上に降ろし、乗員を収容しようとするものである。このため、第1段階として沈没した潜水艦はその位置を救出部隊に知らせるためのメッセンジャー・ブイというものを放出するが、ブイは救難ワイヤーと呼ばれるワイヤー・ケーブルを引っ張りながら水面に上昇する。この救難ワイヤーは、通常、潜水艦の前後部に2個所ある脱出用を兼ねたハッチの中心を通って送出される。現場に到着したチャンバーを搭載した潜水艦救難艦は、潜水艦の真上に位置を固定するよう潜水艦の周囲4個所に錨をおろす。そして、揚収したブイからワイヤー・ケーブルを外し、チャンバーのドラムに接続し、このワイヤー・ケーブルをドラムに巻いていけばチャンバーは脱出用ハッチの真上に到達することになる。潜水艦の甲板に到達したチャンバーはスカート部と呼ばれる乗組員の通路となる空間の海水を排水することによってチャンバーを潜水艦甲板に密着させ、チャンバー側、潜水艦側のハッチを開き、乗組員を収容する。
レスキューチャンバーの構造概要(海上自衛隊提供)
このチャンバーによる救助にはいくつかの問題点、限界があった。その第一は救助した潜水艦乗員が一度大気圧にさらされることである。通常の潜水艦内の気圧は略大気圧であるが、沈没した潜水艦の艦内では気圧が上昇している可能性があり、そのような環境にあった潜水艦乗組員が適切な減圧を行わないで大気圧にさらされるといわゆる潜水病にかかる虞がある。チャンバーを搭載していた海上自衛隊の救難艦「ちはや(初代)」、「ふしみ」には再圧タンクが装備されていたので、乗員を直ちに再圧タンクに収容し、処置することは可能ではあったが、潜水病の危険を避けることはできない。

救難訓練でレスキューチャンバーから出る潜水艦乗組員(海上自衛隊提供)
第二は、潜水艦からの救難ケーブルの長さによってチャンバーで救出できる水深は制限さる。第三に、チャンバーは救難ケーブルや救難艦側からのケーブルによって制御されているとはいえ、救難作業を行う環境の影響を受けざるを得ず、強い海流があったり、潜水艦が傾いていたりすると使用できなくなる。
3.深海救難艇
チャンバーの問題を改善したのが深海救難艇(Deep Submergence Rescue Vehicle:以下、DSRVと言う)である。DSRVの出現のきっかけとなったのは、前述の米原子力潜水艦「スレッシャー」の事故であった。1963年4月、深深度潜航試験を実施中の同艦が沈没し、民間技術者17名を含む129名が殉職した。後に同艦の艦体は水深2.560mの海底に大きくは6つの部分に分かれて発見されており、水深数百mで圧壊したと考えられている。この事故をきっかけに米海軍では深海潜水システム検討委員会が設置されたが、潜水艦救難深海潜水システムの開発が始められ、1971年にDSRV-1が就役し、潜水艦救難の新しい幕が開かれた。
海上自衛隊におけるDSRVへの取組は1975年に救難実験艇「ちひろ」が技術研究本部に納入されたときに始まったと言って良い。1985年にDSRVを搭載した潜水艦救難母艦「ちよだ」が就役し、横須賀に配備された。さらに、2000年には2代目の潜水艦救難艦「ちはや」が呉に配備された。海上自衛隊が装備するDSRVの構造は、水圧に対抗する球形の船体を3つつなぎ合わせ、その外側に動力源となる電池、推進器、スラスター、テレビカメラ、マニミュレータを装備し、これらを覆う船体と潜水艦に密着する(メイティングと言う)上で大切なスカート部などから構成されている。
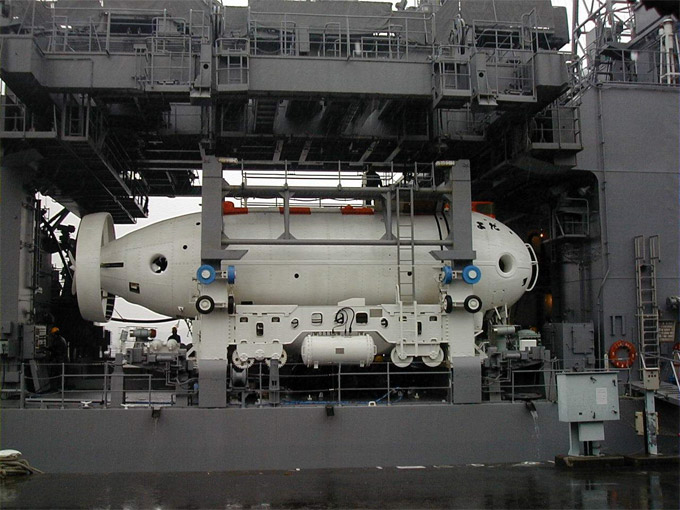
潜水艦救難母艦「ちよだ」のセンターウェル上にあるDSRV(海上自衛隊提供)
DSRVの最大の長所は、深海での救難にも対応できることにある。どこまでを深海というかは問題があるが、少なくとも潜水艦の圧壊深度以上の安全潜航深度が求められていると言えよう。米国の資料によれば米国のDSRVは1,524mまで潜航することができると報じられている。
我が国におけるDSRVによる潜水艦救難の手順は、概ね次のようになる。DSRVを搭載した潜水艦救難(母)艦が発見された沈没潜水艦の近くに進出すると、DSRVは台に乗せられ、救難(母)艦の船体中央にある開口部(センター・ウェル)から直接海中に降ろされ、台から発進したDSRVは下降していき、事前に設置された発信器などを目印に潜水艦に近接する。潜水艦を確認したDSRVは必要であればマニミュレータ―を使用して障害物を除去し、予定の脱出用ハッチの上にメイティングする。メイティングが完了し、スカート内の海水を排除すると、潜水艦及びDSRVのハッチを開いて潜水艦乗組員を収容し、乗組員を収容したDSRVは上昇し、救難(母)艦が降ろしている台の上に進入し、台とともに救難(母)艦に収容さる。潜水艦の艦内圧が上がっていた場合にはDSRVを救難(母)艦に装備されている再圧タンクに直接メイティングし、救出された潜水艦乗員が大気圧にさらされることなく、減圧の処置を行うことが可能である。これもDSRVによる潜水艦乗組員救出の大きな利点の一つである。
DSRVによる潜水艦救難作業の流れ(海上自衛隊提供)
そのほか、DSRVの利点として、自立行動が可能であるため、海象、海底状況、遭難潜水艦の状態等による制約を受けることが少なく、推進器、スラスター、センサー及びこれらを統合した自動操縦装置によってメイティング作業が比較的容易に実施でき、比較的多人数を1回に救出可能であり、母艦と行動中のDSRVは機械的な連接がないため、母艦は占位に制約を受けない制限を受けない等が指摘できる。一方、DSRVは自立行動が可能とは言え、速力は遅く、何度かのトリップの後は電池の充電も必要であり、搭載センサーの能力も限られることから、潜水艦救難艦、母潜水艦等による支援が必要であり、DSRV自体の建造にも相当程度の経費が必要である。
このため、潜水艦が世界で拡散していく一方、潜水艦救難システムを整備、保有できる国は限られている。このような情勢に対応するため、多国間枠組の潜水艦救難体制が進められている。NATOでは遠隔操作式無人機、潜水艦救難機等から構成される北大西洋条約機構潜水艦救助システムが加盟国によって共同運用されている。アジアでは2000年から西太平洋潜水艦救難訓練が実施されており、第3回までは2年ごとに、それ以降は3年ごとに実施されており、2019年はオーストラリアが主催し、日米韓豪、シンガポール、マレーシアの6カ国の海軍が参加し、ロシア、中国等20カ国がオブザーバーとして加わっている。
4.個人脱出
潜水艦乗組員を救出する方法は、上述のチャンバーやDSRV等の潜水艦救難システムによる方法だけではない。浸水の増大、炭酸ガスや塩素ガスによる艦内空気の汚染等によって潜水艦救難システムによる救出を待つ余裕がないような状況では潜水艦の艦長、あるいは生存乗組員の最先任者の判断で潜水艦から乗組員を脱出させることになる。これを個人脱出と言う。
個人脱出の歴史は比較的古く、1928年には先に紹介した米海軍のMomsen大尉が「モンセンの肺」と呼ばれる個人脱出用の装具を開発、実用化に成功しており、英海軍では1931年にデイビス水中脱出装具と呼ばれる装具を使用して潜水艦「ポセイドン」からの脱出に成功している。日本海軍の潜水艦においても2名用の艦外脱出区画が前後部に2個所設置され、簡便な脱出用アクアラングが装備されていたが、日本海軍では使用された実績はない。
個人脱出には自由上昇法と装具を使用した方法があり、自由上昇法とは人間が持つ浮力に委ねて潜水艦から水面まで上昇していく方法である。この際、上昇するに従い、水圧は減少していき、その分、肺は膨張し、息を止めていると最後には肺が破裂することになる。これを防止するため、口をとがらせ、ストローから息を吐く感じで途切れることなく息を吐き続け、かつ自分が吐いた息によってできる泡よりも早く上昇することがないよう注意する必要がある。
装具を使用した方法として、海上自衛隊では長くアメリカで開発されたスタンキーフードを使用した方法を採用してきた。また、自由上昇法との中間に位置するものとして、救命胴衣だけを装着して脱出する浮力上昇法もある。
スタンキーフードは下の写真のように膨張式の救命胴衣の上にチャックと防水テープでフードが取り付けられており、フードの中には逃気弁と呼ばれる弁が2個付いている。
スタンキーフードを用いる方法では、乗組員はスタンキーフードを装着して脱出筒内に入り、下部ハッチを閉鎖して、上部ハッチの下部についているスカートの下端の少し上くらいまで脱出筒内に海水を入れる。そこでフードをかぶり、高圧空気によって脱出筒内を潜水艦がいる深度に対応した気圧まで加圧し、外圧と均圧したところで上部ハッチを開き、高圧空気によって救命胴衣を膨らませ、スカートをくぐって艦外に脱出する。上昇を始めると水圧の変化で救命胴衣の中の空気は膨張しようとするが、逃気弁があるのでそこから空気はフード内に逃げていく。言い換えれば、フード内にその水深にほぼ対応した圧力の空気が供給され、脱出する潜水艦乗員は呼吸を続けながら上昇することが可能になるということである。もちろん、呼吸を続けながら、といってもかなりのスピードで上昇するため、特別な呼吸法が必要になる。各回の最後に脱出する者は打音で艦内に最後が脱出する旨を伝え、一定の間隔を開けた後、艦内から上部ハッチを閉鎖し、海水を艦内に排水して、下部ハッチを開き、脱出を繰り返す。

スタンキーフード(筆者撮影)
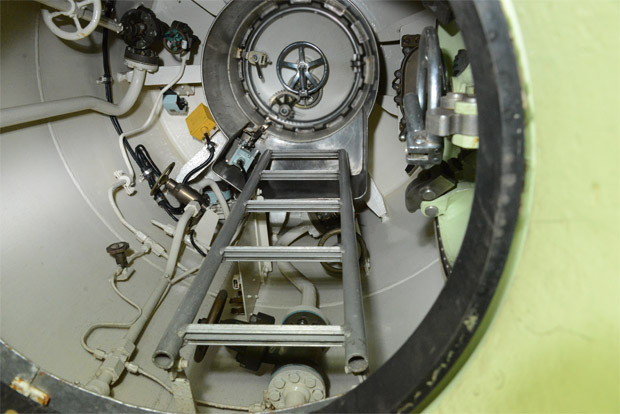
脱出筒内部(海上自衛隊提供)
ただ、スタンキーフードによる脱出の欠点の一つは低水温による障害を避けることができないことである。この方法では、乗組員の身体そのものは直接海水に触れるため、海水温度が低い状況では水面に到達しても生存の可能性は限られたものとなる。第二の問題として、大きな水圧のかかった海底にある潜水艦から脱出するためにはそのハッチを開く必要があり、前述のように、脱出筒内で気圧を沈没している水深の水圧まで加圧するが、その際、窒素酔い等を起こすことが避けられなくなる。
これらの問題を克服するため、Submarine Escape Immersion Equipment Mk Xという全身型の装具が開発、導入された。これは英海軍が開発したSubmarine Escape Immersion Suitに海面到達後の乗組員の安全確保のため小型ライフ・ラフトを取り付けたものであり、現在は後継機であるSubmarine Escape Immersion Equipment Mk XIが海上自衛隊でも使用されている。
関連記事